
Surgeries which require precise manual positioning are hampered by the small involuntary movements that are inherent in normal hand motion, e.g. physiological tremor (tremor (6-10 Hz, ~50µm rms), myoclonic jerk & drift (<3Hz, ~300µm max). This intrinsic manual erroneous movement restricts the number of qualified microsurgeons and limits their career lifespan as hand stability deteriorates with age.
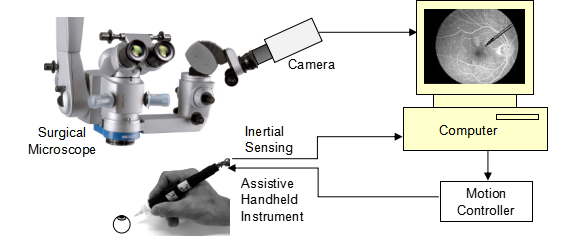
The project explored an assistive robotic handheld microsurgical instrument capable of sensing its own motion, distinguishing between erroneous and intended movement of the hand with real-time sensor fusion algorithms, and compensating the erroneous component by deflecting the tooltip in an equal but opposite motion in real-time with a 3 degrees-of-freedom (DOF) robotic micromanipulator.
The system can track the movement of the instrument and fuse the sensor information with the measurement information to further enhance the positioning accuracy.
When the target come within the workspace of instrument robotic micromanipulator, the system manipulates the tip to move toward a visual target while the instrument continues to compensate for the manual manipulation error of the surgeon.
Funding
- Under Commercialization
Publications
-
T. Ang, P. K. Khosla and C. N. Riviere, "Feedforward Controller With Inverse Rate-Dependent Model for Piezoelectric Actuators in Trajectory-Tracking Applications," in IEEE/ASME Transactions on Mechatronics, vol. 12, no. 2, pp. 134-142, April 2007, doi: 10.1109/TMECH.2007.892824.
-
N. Riviere, Wei Tech Ang and P. K. Khosla, "Toward active tremor canceling in handheld microsurgical instruments," in IEEE Transactions on Robotics and Automation, vol. 19, no. 5, pp. 793-800, Oct. 2003, doi: 10.1109/TRA.2003.817506.
-
Wei Tech Ang, P. K. Khosla and C. N. Riviere, "Design of all-accelerometer inertial measurement unit for tremor sensing in hand-held microsurgical instrument," 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), 2003, pp. 1781-1786 vol.2, doi: 10.1109/ROBOT.2003.1241852.
-
Wei Tech Ang, P. K. Khosla and C. N. Riviere, "Design of all-accelerometer inertial measurement unit for tremor sensing in hand-held microsurgical instrument," 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422), 2003, pp. 1781-1786 vol.2, doi: 10.1109/ROBOT.2003.1241852.
-
Wei Tech Ang, C. N. Riviere and P. K. Khosla, "Design and implementation of active error canceling in hand-held microsurgical instrument," Proceedings 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No.01CH37180), 2001, pp. 1106-1111 vol.2, doi: 10.1109/IROS.2001.976316.
-
C. Veluvolu, U. X. Tan, W. T. Latt, C. Y. Shee and W. T. Ang, "Bandlimited Multiple Fourier Linear Combiner for Real-time Tremor Compensation," 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2007, pp. 2847-2850, doi: 10.1109/IEMBS.2007.4352922.
-
Veluvolu, K.C.; Ang, W.T. Estimation of Physiological Tremor from Accelerometers for Real-Time Applications. Sensors 2011, 11, 3020-3036. https://doi.org/10.3390/s110303020
-
Wei Tech Ang, P. K. Khosla and C. N. Riviere, "Kalman filtering for real-time orientation tracking of handheld microsurgical instrument," 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No.04CH37566), 2004, pp. 2574-2580 vol.3, doi: 10.1109/IROS.2004.1389796.
-
T. Ang, P. K. Khosla and C. N. Riviere, "Nonlinear Regression Model of aLow-$g$ MEMS Accelerometer," in IEEE Sensors Journal, vol. 7, no. 1, pp. 81-88, Jan. 2007, doi: 10.1109/JSEN.2006.886995.
-
Dingguo Zhang, Philippe Poignet, Ferdinan Widjaja, Wei Tech Ang, Neural oscillator based control for pathological tremor suppression via functional electrical stimulation, Control Engineering Practice, Volume 19, Issue 1, 2011, Pages 74-88, ISSN 0967-0661, https://doi.org/10.1016/j.conengprac.2010.08.009.
-
-X. Tan, K. C. Veluvolu, W. T. Latt, C. Y. Shee, C. N. Riviere and W. T. Ang, "Estimating Displacement of Periodic Motion With Inertial Sensors," in IEEE Sensors Journal, vol. 8, no. 8, pp. 1385-1388, Aug. 2008, doi: 10.1109/JSEN.2008.917488.
-
K.C. Veluvolu, W.T. Latt, W.T. Ang, Double adaptive bandlimited multiple Fourier linear combiner for real-time estimation/filtering of physiological tremor, Biomedical Signal Processing and Control, Volume 5, Issue 1, 2010, Pages 37-44, ISSN 1746-8094, https://doi.org/10.1016/j.bspc.2009.06.001.
-
U-X. Tan, W. T. Latt, C. Y. Shee, C. N. Riviere and W. T. Ang, "Feedforward Controller of Ill-Conditioned Hysteresis Using Singularity-Free Prandtl–Ishlinskii Model," in IEEE/ASME Transactions on Mechatronics, vol. 14, no. 5, pp. 598-605, Oct. 2009, doi: 10.1109/TMECH.2008.2009936.
-
Tatinati, K. C. Veluvolu and W. T. Ang, "Multistep Prediction of Physiological Tremor Based on Machine Learning for Robotics Assisted Microsurgery," in IEEE Transactions on Cybernetics, vol. 45, no. 2, pp. 328-339, Feb. 2015, doi: 10.1109/TCYB.2014.2381495.
-
Latt, W.T.; Veluvolu, K.C.; Ang, W.T. Drift-Free Position Estimation of Periodic or Quasi-Periodic Motion Using Inertial Sensors. Sensors 2011, 11, 5931-5951. https://doi.org/10.3390/s110605931
-
C. Veluvolu, S. Tatinati, S. -M. Hong and W. T. Ang, "Multistep Prediction of Physiological Tremor for Surgical Robotics Applications," in IEEE Transactions on Biomedical Engineering, vol. 60, no. 11, pp. 3074-3082, Nov. 2013, doi: 10.1109/TBME.2013.2264546.
-
T. Ang, P. K. Pradeep and C. N. Riviere, "Active tremor compensation in microsurgery," The 26th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 2004, pp. 2738-2741, doi: 10.1109/IEMBS.2004.1403784.
-
Palmes, W. T. Ang, F. Widjaja, L. C. Tan and W. L. Au, "Pattern Mining of Multichannel sEMG for Tremor Classification," in IEEE Transactions on Biomedical Engineering, vol. 57, no. 12, pp. 2795-2805, Dec. 2010, doi: 10.1109/TBME.2010.2076810.
-
L. Zhang, M. L. Han, M. Y. Yu, C. Y. Shee and W. T. Ang, "Automatic Hysteresis Modeling of Piezoelectric Micromanipulator in Vision-Guided Micromanipulation Systems," in IEEE/ASME Transactions on Mechatronics, vol. 17, no. 3, pp. 547-553, June 2012, doi: 10.1109/TMECH.2011.2106136.
- T. Latt, U. -X. Tan, C. Y. Shee, C. N. Riviere and W. T. Ang, "Compact Sensing Design of a Handheld Active Tremor Compensation Instrument," in IEEE Sensors Journal, vol. 9, no. 12, pp. 1864-1871, Dec. 2009, doi: 10.1109/JSEN.2009.2030980.
-
Ang, W.T., Riviere, C.N., Khosla, P.K. (2000). An Active Hand-Held Instrument for Enhanced Microsurgical Accuracy. In: Delp, S.L., DiGoia, A.M., Jaramaz, B. (eds) Medical Image Computing and Computer-Assisted Intervention – MICCAI 2000. MICCAI 2000. Lecture Notes in Computer Science, vol 1935. Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-540-40899-4_91
-
Tatinati, K. C. Veluvolu, S. -M. Hong, W. T. Latt and W. T. Ang, "Physiological Tremor Estimation With Autoregressive (AR) Model and Kalman Filter for Robotics Applications," in IEEE Sensors Journal, vol. 13, no. 12, pp. 4977-4985, Dec. 2013, doi: 10.1109/JSEN.2013.2271737.
-
-X. Tan, W. T. Latt, C. Y. Shee and W. T. Ang, "A Low-Cost Flexure-Based Handheld Mechanism for Micromanipulation," in IEEE/ASME Transactions on Mechatronics, vol. 16, no. 4, pp. 773-778, Aug. 2011, doi: 10.1109/TMECH.2010.2069568.
Involved People
Collaborators