
To assess the ability of the Mobile Robotic Transfer Assistant (MRTA) to navigate autonomously when called and follow on and its extendable robotic arm will be able to perform an totally dependent transfer usually needing 1-2 persons with 1 person guiding the robotic arm to the destination.(compare with ceiling hoist transfer)
The number of older persons (aged 65 years or over) is projected to reach 1.5 billion in 2050. Due to frailty and high disability rates, older person usually have difficulties in performing ADL task independently. Among all the difficulties reported for ADL task, transfer (14.4%) difficulty is ranked second highest for elderly .
In hospital side, one out of every four bedridden patients in a typical hospital is not self-reliant and needs assistance, both to be transferred and rehabilitated. This need is even more pronounced at nursing homes . Meanwhile, 12 percent of nurses leave the profession each year due to back injuries, and 52 percent suffer from chronic back pain due to need to care for overweight patients with very little help.
In a typical home setting, manual transfer (Figure 1 (a)) is still the default choice by the caregivers, because of the cost and hassle of installing a ceiling hoist (Figure 1 (b)), and constraint of space to effectively operate a mobile hoist and a wheelchair (Figure 1 (c)).
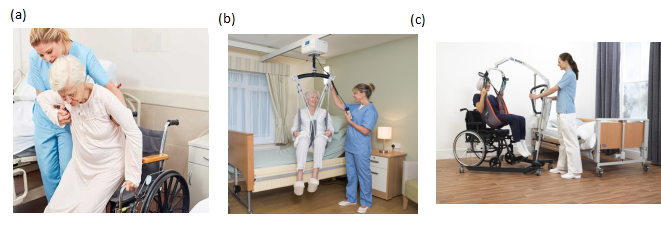
Figure 1 Traditional Transfer Method
The solution MRTA (Mobile Robotic Transfer Assistant) we proposed combine the transfer device and the wheelchair into one piece to save the operational space needed (Figure 2).

Figure 2 Mobile Robotic Transfer Assistant (MRTA)
MRTA is a powered wheelchair equipped with a collaborative robotic arm that is able to carry a patient up to 90 kg via a harness system. It is designed to enable one caregiver to perform safe transfer of a max-assist patient. During transfer of a patient in and out of the wheelchair, the robotic arm supports the patient’s body weight while the caregiver collaboratively manipulates the arm to guide the process of lifting, swinging into position and lowering of patient.
Funding
- National Robotics Programme
- SG Health Assistive & Robotics Programme
Publications
Involved People
Collaborators