
In assistive robotics, real world studies with human subjects are essential during development but often, it is difficult to obtain data with subjects due to a variety of reasons. This slows the development process and limits the number of iterations robotics engineers can perform, thus, limiting the overall quality of robot developed.
The project will explore the development of a human model based on existing motion capture technologies to obtain the biomechanics capabilities of each subject for walking and balance tasks without the use of any assistive devices. The human model will be integrated with a robot in simulation. Subject specific human-in-the-loop robotics development will be explored in simulation for assistive robots on walking and balance tasks.
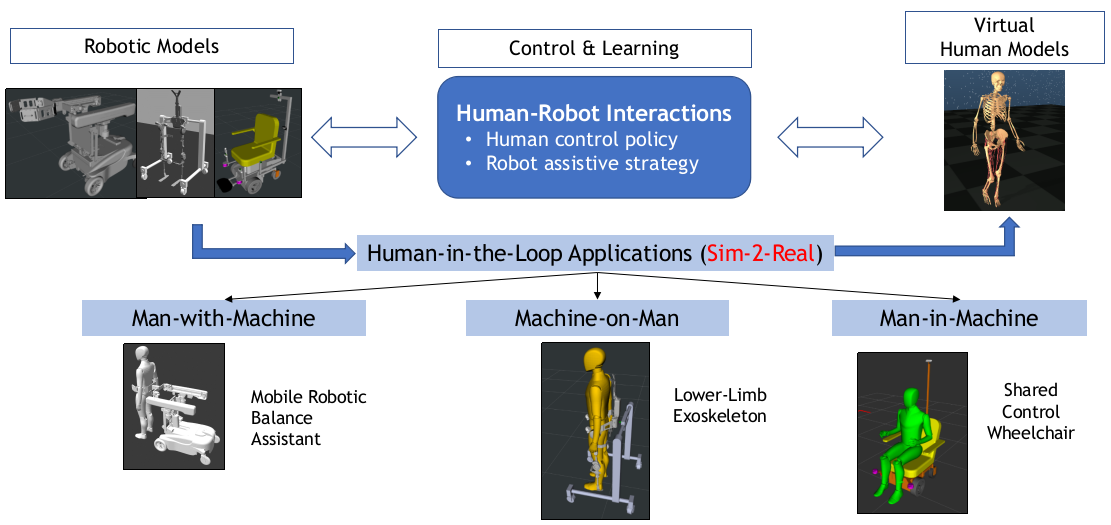
To accurately simulate the each person, we first create a personalised virtual musculoskeletal (MSK) model for that person and use machine learning to train a control policy for that person such that it moves just like the real person.
With this virtual model, we create various environments, robots and tasks to see the performance of the model and optimise the robot assistance accordingly to suit that person. The optimised robot controls will serve as an important baseline for our real robots that eventually assist the person.
Funding
Publications
Involved People
Collaborators